Temperature Control Embedded System Implemented In C
By Bhavishey Thapar
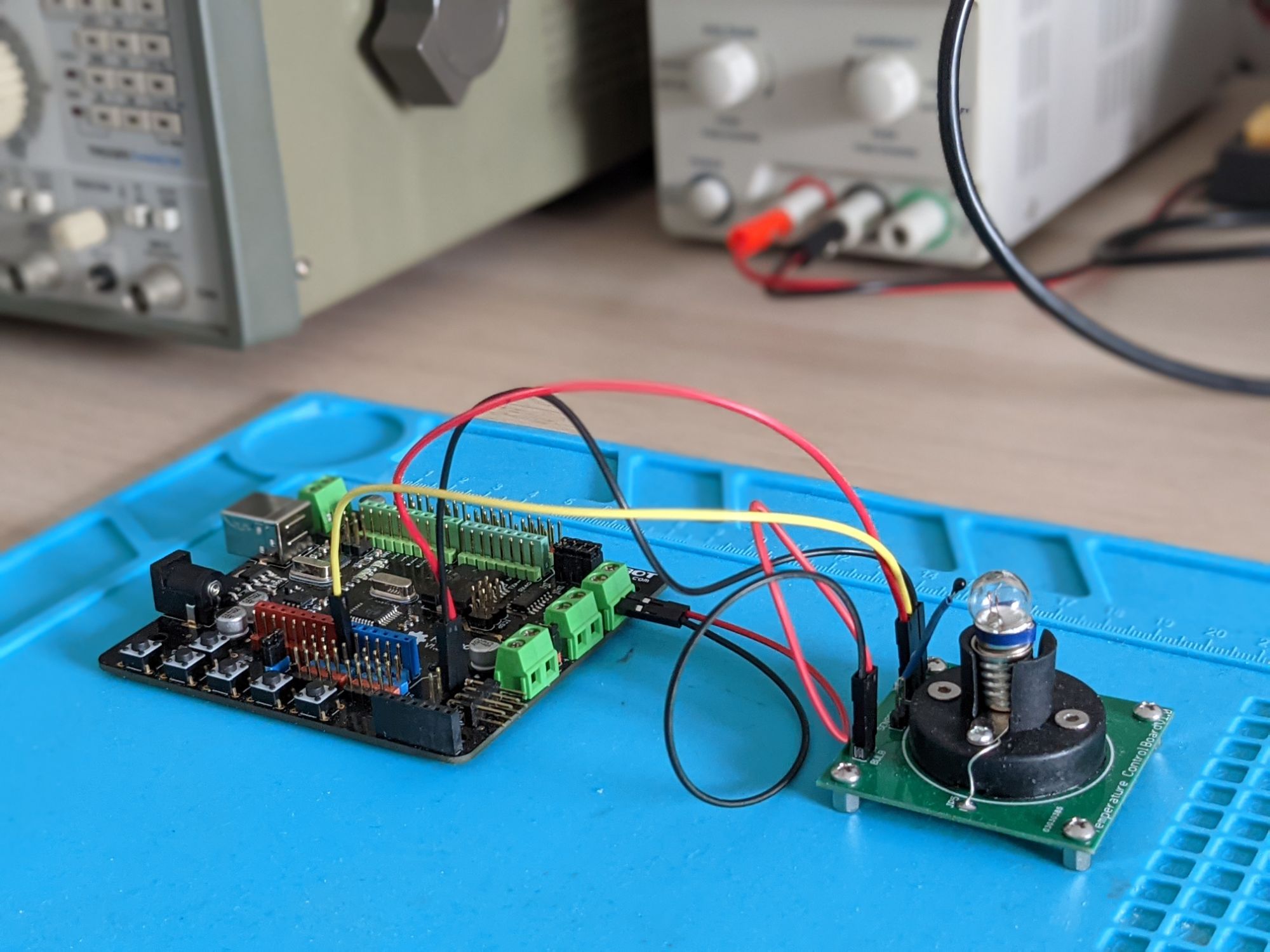
This project implements a PID temperature controller using the Romeo microcontroller board and the Temperature Control Board (TCB), both available on Curios Circuits website. The code is available on GitHub.

Using Extended Kalman Filter For Robot Pose Estimation
By Bhavishey Thapar
This project implements a recursive Extended Kalman Filter (EKF) to estimate a robot's pose by fusing wheel odometry data with range/bearing measurements coming from a laser rangefinder.